
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||||||
|
|||||||||||||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

�Ϻ����ˌ��I�ṩZRJQR-XC���I�C���˾��̼�ϵ�y���Ɍ�Ӗ�_,�nj��I�Ľ̌W�O�����a�S�ң��҂��gӭ�����҂����a���ؿ���ZRJQR-XC���I�C���˾��̼�ϵ�y���Ɍ�Ӗ�_���������ṩ���I�Ľ�Q�������̌W�O����Խ�Q�̎��̌Wȱ��ƽ�_���W��ȱ�ٌ��ٽ����y�}��ZRJQR-XC���I�C���˾��̼�ϵ�y���Ɍ�Ӗ�_�������˹�˾��Ʒ�|Ч�汣�Ͻ̌W�aƷ�� �������еĈDƬ�酢���DƬ,�H������,�Ԍ�����.
�����P�I�~��ZRJQR-XC���I�C���˾��̼�ϵ�y���Ɍ�Ӗ�_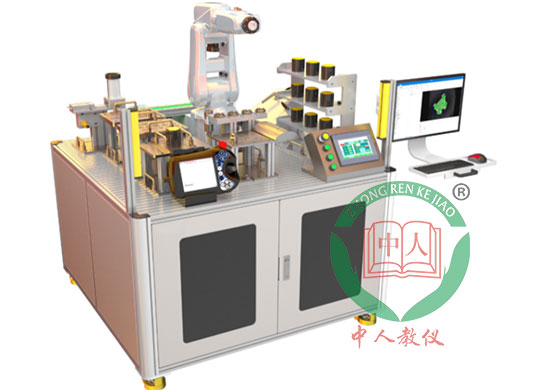
1.1.�aƷ����Ҫ��
����1+X���I�C���ˑ��þ��̵ļ��g�˜ʣ�Ҳ֧�֙C����ϵ�y���ɡ�����ģ�K���OӋ��Ӳ�����ÿ��������ɹ��I�C���ˡ����ƽ�_����Q���b�A�ߡ�܉�E�c�L�Dģ�K�����\ģ�K���a��ģ�K���b��ģ�K��ݔ�;�ģ�K����ʽ����ģ�K���}��ģ�K��׃λ�Cģ�K��PLC늚����ģ�K��ͨ��늚�ӿ�ģ�K���O��O�ؔz���^����Դģ�K�����I�C���˷���ܛ���ȽM�ɡ������ṩ���Ŀ���̌W�YԴ������Ŀ���H����Ӳ�����ƽ�_��ɣ�Ҳ�����ڙC���˷���ܛ����̓�M����_����ɡ�
1.2.�aƷ���g����
1���C�_�ߴ磺1200mm*1200mm*1500mm��
2�������Դ�����������ƣ�AC220V��5%��50HZ��
3����ȫ���o��©늱��o���^�����o����·���o��
4���~�����ʣ���2KW��
1.3.�aƷ���ý�B
1.3.1.���I�C����(abb)
(1)�C���˱��w
����3Kg���Ĺ��I�C���ˣ�IRB120 3/0.6�͡��C���˼��g�������£�
1�����I�Cе�ֹ����돽����580mm����Ч���أ���3kg��
2���S����6�S��
3���C���˸��P���D�ӷ������������ٶȣ��S1��-165�㡫+165�㣬250��/s���S2��+110�㡫-110�㣬250��/s���S3��+70�㡫-90�㣬250��/s���S4��+160�㡫-160�㣬320��/s���S5��+120�㡫-120�㣬320��/s���S6��+400�㡫-400�㣬420��/s��
4���C���������25kg��
5��λ���؏;��ȣ���0.01mm��
6�����w���o�ȼ���IP30��늿ع���o�ȼ���IP20
7��������̖Դ�������O10·��̖��·�����ɚ�Դ�������O4·��·
8����������IRC5�o����
(2)�C���˿�������
����IRC5�o���Ϳ�����,��Ҫ������
1���ߴ磺�ߡ������ 310mm��449mm��442mm����5mm����
2��늚��B�ӣ��Դ늉�������220/230v��50-60Hz��
3�����o�ȼ���IP20��
4���h���������h���ض�0-45�ȣ�������ȣ����95%���o��˪����
5������������ܝ�s�ھo���ęC��ȣ���ʡ���g�������Դ׃���{ԇ���A�O������̖���ⲿ�ӿڣ����ÿ���չ��С��16·ݔ��/16·ݔ��I/Oϵ�y���ɔUչ�C��ҕ�X�ȶ�N����O�䡣
6���C���˿���ϵ�yܛ����횻���WINCEƽ�_���Ա���ڙC���˵Ķ����_�l���C���˿���ϵ�yԭ��̑B�惦���������õ���1G����֧��USB�Uչ�鸱�惦����
(3)���I�C����ʾ������
1��֧���քӲٿv���������������ü��O�أ�
2������6.5��LCD�@ʾ����
3���߂�o��ͣ�C���ܣ�
4���߂�3λ�����_�P���p��·����
5�������քӲ����U����Q��λ��
6�����o�ȼ���IP54
7������12�I��Ĥ�I�P��
8��֧�֟��Σ�
9�����Д�������c�֏���USB�ӿ�1��;
1.3.2.�������ƽ�_
�C���˲������ƽ�_�������w���X�Ͳ�ƴ�Ӷ��ɣ��ȷ����k����ϣ��A���И˜ʚ�Դ��늚�ӿڰ��bλ�á��_�������X�Ͳģ�ͨ�^T���ݽz���b��ƽ�_�Ͽ��ι̰��b��N��ܶ�����ģ�K��ƽ�_�A�O�ж�λ�K���Է��������ܶ�����ģ�K�Ķ�λ�����b�̶������Fģ�K���ٵ��Զ��xλ�ð��b�����γߴ磺1200mm��1200mm��830mm��
����ƽ�_�ϰ��b��Ű�ȫ���o��ʩ��늚����ģ�K���ü�ͣ���o�����C�O���\�Еr���ˆT��ȫ���}��
1.3.3.��Q����ģ�K
��Q�����_������Ʒ�ƣ�����1���C���˂ȹ��߱P��4�����b�ȹ��߱P��ؓ�d��5KG����Q����ģ�K�ɿ�Q�̶��װ塢��Q֧�ܵȽM�ɡ�������ͬ�Č�ӖĿ�˺Ͳ��������ṩ��N��ͬ�Ŀ�Q���ߣ����Î��ж�λ�͙z�y���ܹ���֧���ϣ��ɸ�����ͬ�Č�Ӗ��������ģ�K�Լ����ߵķN͔���������ęC����ĩ�˹����У������P���ߡ�����s����ߡ�צ�ֹ��ߡ���ĥ���ߡ�����s����ߎ����ɾ��_��������������𣬲��ɸ��Q���w�Ĺ��ߡ�
(1)��Q֧�ܼ��g������
1�����γߴ磨�L�������ߣ���250mm��120mm��180mm����5mm��
2��������4����Q����
(2)��Q�P���g������
1����Q�b�ò��|�����w���|�X�Ͻ𣬾o�i�C���Ͻ��
2�����أ�5kg
3�����S���أ�20N��m
4������������0.3-1MPa
5��������0.5kg
(3)�����P�����g������
1�����P�P����20mm����2mm��
2��������10N������հl������늴��y
(4)צ�ֹ����g������
1�������8mm
2���г̣�15mm
(5)��ĥ����
1��ֱ���o���o���{��늙C��늉�9-24V
2���f�܊A�^0-4mm
(6)����s�����
1��������ͣ��L�D�P���ߣ�TCPᘼ⣬���քӸ��Q����
2������s����ߎ����ɾ��_���������������
1.3.4.܉�E�c�L�Dģ�K
ģ�K���ô����OӋ������N��ͬ�ĈD��������D������Ҫ�������ܣ��C����TCP�������������˲������\��ָ��ʾ���c���̲�����ֱ����ƽ�����������g�������\���^�ɰ돽�Ȳ��������љC����TCPᘼ���Q�鮋�P�������L�D�����M���L�D��������Ҫ���g������
1�����γߴ磨�L�������ߣ���250mmX200mmX180mm
2��TCPᘼ⣺֧��
3���D�Σ�ֱ����ƽ�����������g�������\���^�ɰ돽�Ȳ���
1.3.5.���\ģ�K
���\����ģ�K��Ҫ�ɹ̶��װ塢���\�ωK�ȽM�ɣ����\�ωK�֞�3�N�Πÿ�N�Π�3�N��ͬɫ�ʡ������ȷ������ϰ��ϣ����I�C����ͨ�^�x�����ߣ����F��ͬ�Π����ϵİ��\���ѹ����ŵ����ϰ匦���Ă}���ϣ����ϰ�M��ƽ�棬��а��\Ҫ��ʹ�÷������ӡ���Ҫ���g������
1�����γߴ磨�L�������ߣ���250mmX200mmX182mm��
2��������ͣ������Ρ��A�Ρ�������
3�������ɫ���t���G���S
1.3.6.�a��ģ�K
�a��ģ�K��Ҫ�ɴa��̶��װ塢�a����塢�����ȽM�ɡ�����2�N��ͬ�ߴ�Ĺ��������I�C����ͨ�^���P���߰�Ҫ��ʰȡ�a������M�дa���΄գ��ܾ��������I�C���˴a������Ⲣ���پ���ʾ�̵ď���Ӗ��������Ҫ��a��������[�ŵ��װ������}��ȣ��C����ͨ�^���P���߰�Ҫ��ʰȡ�a������M�дa���΄գ��ɸ�����Ҫ���ɽM�ϴa�����N�Π��Ҫ���g������
1�����γߴ磨�L�������ߣ���250mmX200mmX182mm��
2�����ϳߴ磺25mm*25mm 8�K��25mm*50mm 4�K��
1.3.7.�b��ģ�K
�ɹ̶��װ塢��λ�K���A�o��ȽM�ɡ�ͨ�^�A�o��������̶���Ӗ�������I�C���˾��_��λʹ�õČW������Ҫ���g������
1�����γߴ磨�L�������ߣ���250mmX200mmX205mm��
2���p�S����г̣�50mm��
3��V�͉K�̶��A�ַ�������30mm����65mm��
1.3.8.ݔ�;�ģ�K
ݔ�;�ģ�K��Ҫ��Ƥ��ݔ�͙C���̶��װ�ȽM�ɡ�Ƥ��ݔ�͙C���X�Ͻ��ͲĴ���ɣ����Æ��ཻ���{��늙C�ӡ�ݔ�͙C�ϰ��b��늂������c����b�D�����ԙz�y�c����������{��늙C��Ƥ�����\ݔ��������͎��І�ͣ���{�ٹ��ܡ�ģ�K�m��˜�늚�ӿ�������Ҫ���g������
1�����γߴ磨�L�������ߣ���610mm * 124mm * 162mm��
2��ݔ�͙C�L�ȣ�600mm��
3����Ч�������ȣ�54mm��
4������ٶȣ���4m/min��
5������늉���DC24V��
6���{������늉�������AC220V���l�ʣ�50/60Hz���{�ٷ�����90-3000r/min��
1.3.9.��ʽ����ģ�K
��Ҫ�ɾ�ʽ���ϙC���̶��װ塢�������ȽM�ɡ����ڃ����N�����ͨ�^������^�M�й��ϣ�ģ�K�m��˜�늚�ӿ������C���˻�PLCͨ�^������ݔ��ݔ�����ƣ��������Ĺ��ϣ��ς}�O�غ����^�Ŀ��ơ������c����ģ�K�M�нM�ϣ����F��ͬ�Č�Ӗ�΄ա���Ҫ���g������
1�����γߴ磨�L�������ߣ���265mmX120mmX325mm��
2���ЙC�������L����100mm��
3���Ӛ���г̣���75mm��
1.3.10.�}��ģ�K
��Ҫ�ɹ̶��װ塢���w�}�졢�z�y�������ȽM�ɡ�ÿ����λ���Йz�y��������ͨ�^��������̖�z�y���є�����ݔ��PLC��������PLC�c�C����ͨ�^����ͨ�š��C���ˌ��r�xȡPLC�Ď�λ��Ϣ���M�й����ij�����졣��Ҫ���g������
1�����γߴ磨�L�������ߣ���360mm��150mm��400mm��
2���m��˜ʌ�Ӗ�_��λ���b��
3���}��������9��
4�����ݹ����N�2�N��
5����̫�WI/O�ɼ�ģ�K��ͨӍ�f�h��Modbus-TCP��
1.3.11.׃λ�Cģ�K
��Ҫ��׃λ�C���̶��װ�ȽM�ɡ�ģ�K�m��������������͘˜�늚�ӿ�������׃λ�C�Uչ��C���˵�7�S��ԓģ�K�����c��������ģ�K�M��ʹ�ã��簲�b��ĥģ�K�������ŷ�ϵ�y�ڹ��I�C�����еđ��úͿ��Ʒ�������Ҫ���g������
1�����γߴ磨�L�������ߣ���570mm��254mm��310mm��
2���m��˜ʌ�Ӗ�_��λ���b��
3���г̣���45�㣻
4���ٶȷ�����10��30��/s��
5���ӷ�ʽ�������ŷ�+���ǜp�ٙC��
6�����ǜp�ٙC�Ĝp�ٱȡ�9��
7���ŷ�늙C���ʡ�100W��
8���ŷ���PLC���ƣ��}�_/������ƣ�
9������ƽ�_����ĥģ�K��
1.3.12.늚����ģ�K
����PLC���������˙C���档����������ģ�K�����o�����OӋ,�ɔUչ�����И˜ʹ��Iͨ�Žӿڣ��m���ڌ��F����߉���ơ���߉���ơ��W�jͨ���c���Ƒ��ã�ͨ�^���Iͨ�žW�j�c�C����ͨ�š�֧��PLC�����_�l�c늚�ϵ�y���ɡ�
(1)�������������T��S7-1200����Ҫ���g������
1�������惦����75KB��
2���b�d�惦����4MB��
3�������Դ惦����10KB��
4����������14DI/10DO��ģ�M����2AI��
5��λ�惦����M�^����8192�ֹ���
6������Ӌ������6·��
7���}�_ݔ����4·��
8����̫�W�˿ڔ���1����
9��ͨ�Ņf�h֧�֣�PROFINET��TCP/IP��SNMP��DCP��LLDP��ISO-on-TCP��UDP��Modbus��S7��ͨ�Ņf�h��PROFIBUS��AS�ӿ�ͨ�ŔUչ��֧�֣�
10��������ݔ�ʣ�10/100Mb/s��
11�������\������ٶȣ�0.08��s/ָ�
12���Ƅ��ֈ����ٶȣ�1.7��s/ָ�
13���������W�\������ٶȣ�2.3��s ָ�
(2)�˙C������Ҫ���g������
1���@ʾ����7Ӣ��� TFT �@ʾ����16777216 ɫ��
2���ֱ��ʡ�800��480 ���أ�
3��������ʽ���|������
4������o���ϕr�g��80000H��
5���Ñ�ȴ棺12MB��
6��늉��~��ֵ��DC24V��
(3)�������I����ͣ���_ʼ��ֹͣ���澯��
1.3.13.ͨ��늚�ӿ�ģ�K
늚�ӿ�ģ�K���b�ژ˜ʌ�Ӗ�_늿ذ��ϣ�������7�M늚⌣�ýӿڣ�3�Mͨ��늚�ӿڣ�6���W�j�ӿڡ�ͨ�^���ղ��^���|�c����Դ����ģ�K�M���B�ӣ����F�O�������c��ģ�K֮�g�Ĺ�늼�ͨӍ��
(1)늚�ӿڿ��w���gҪ��
1��ͬ��ͺ��ղ��^���|ͨ�ã�
2����ͬ��ͽӿڷ������o��
3���ӿڲ������Cеλ�ñ��o��
4���ӿ�ͨ�^���ղ��^��|�M���B�ӣ�
5�����ղ��^о����6о�����ղ��^ֱ����12mm��
(2)����늚�ӿڼ��gҪ��
1����ݔ��ģ�M늚�ӿڼ��g������һ�M������̖���ղ��^ ��
2�������M�ϙC��ģ�M늚�ӿڼ��g������һ�M������̖���ղ��^��
3��׃λ�Cģ�M늚�ӿڼ��g������һ�M������̖���ղ��^��
4��RFIDģ�K늚�ӿڼ��g������һ�M������̖���ղ��^��
5�����D����ģ�M늚�ӿڼ��g������һ�M������̖���ղ��^̖��
6�������Sģ�M늚�ӿڼ��g������һ�M������̖���ղ��^��
7�����w�}��ģ�M늚�ӿڼ��g������һ�M������̖���ղ��^��
(3)ͨ��늚�ӿڼ��gҪ��
1��PLCͨ��늚�ӿڼ��g������1�M24V�Դ��3λPLC������ݔ�룬3λPLC������ݔ����
2��ADͨ��늚�ӿڼ��g������1�M24V�Դ��2λģ�M��ݔ�룬2λģ�M��ݔ����
3��Robotͨ��늚�ӿڼ��g������1�M24V�Դ��2λ�C���˔�����ݔ�룬2λ�C���˔�����ݔ����
(4)�W�j�ӿڼ��gҪ��2λRJ45�ӿڡ�
1.3.14.�O��O�ؔz���^
�O��O�ؔz���^���ڌ��r��ƌ���_����ҕ�l����Ҫ������
1����������ͣ�1/2.5" CMOS��
2���D��ߴ磺1920��1080��
3����С�նȲ�ɫ: 0.005 Lux @ (F1.2�� AGC ON)��
4���R�^��2.8mm,ˮƽҕ���ǣ�98.2�㣻
5���{���Ƕ�ˮƽ��0��~355�㣻��ֱ��0��~75�㣻
6�����T��1/3s~1/100000s��
7��ҕ�l���s�˜ʣ����a��: H.265/H���Ӵa��: H.265/H.264/MJPEG��
8��ҕ�l���s�a�ʣ�32Kbps~8Mbps��
9��ͨӍ�ӿڣ�1��RJ45 10M/100 M���m����̫�W�ڣ�
10���Դ������DC12V��25%,��5.5mm�A�ڣ�
11���ߴ磺��121��92mm��
1.3.15.��Դģ�K
�����o����680W ��30L�՚≺�s�C1�_���՚��^�V��һ�����^�V����5�ף������F���x��һ�������x����0.03�ף����p���yһ��������ጷ��yһ����
(1)����Ŀ
�Ŀ1���C�����J֪
�΄�1 ���I�C���˱��w�Y����B
�΄�2 ���I�C�C����늿ع��B
�΄�3 �C�����c���ƹ���B��
�΄�4 ʾ��������
�Ŀ2���C�����c�Ӳ���
�΄�1 �˽�C�����и��N����ϵ
�΄�2 �P������ϵ���c�ӣ��S������
�΄�3 �����c������ģʽ�Ͳٿv�U�i��
�΄�4 ������ϵ���c��
�΄�5 ��������ϵ
�΄�6 ��������ϵ
�Ŀ3����������ϵ�c�˶�
�΄�1 ��������ϵ����
�΄�2 ���չ��������и����������x
�΄�3 ��������ϵ�Ę˶�
�Ŀ4��ԭ�cУ�ʺͳ������
�΄�1 ԭ�cУ��
�΄�2 ����Y��
�΄�3 ϵ�y���/���d
�΄�4 ����ď���
�Ŀ5���\��ָ��̲���
�΄�1 ���ՙC���˳���Ę���
�΄�2 �����\��ָ��ĺ��x
�Ŀ6���cλʾ���c�\�Ӿ���
�΄�1 ���c��λ��
�΄�2 �ij����ٶ�
�΄�3 ���D���돽
�΄�4 �����{�úͷ���
�΄�5 ָ��ď���ճ�N
�΄�6 ָ��Ąh��
�΄�7 �\�г���
�Ŀ7����������ϵ�c�\�Ӿ��̲���
�΄�1 �������˵�ʹ�È���
�΄�2 �������˵Ĕ������x
�΄�3 ��������ϵ���c�����x
�΄�4 ��������ϵ�Ľ���
�΄�5 ��������ϵ���քӲ���
�΄�6 ��������ϵ�¾���
�Ŀ8���M�Aָ��̲���
�΄�1 ƫ��ָ����÷�
�΄�2 ��ֵ���׃���͌����Ĕ��W�\��
�΄�3 �ӕrָ����÷�
�΄�4 �Ԅ��\�Еr�����ʵ��÷�
�Ŀ9��I/O���̲���
�΄�1 ������I/O������
�΄�2 I/O�����{ԇ
�Ŀ10���l���cѭ�h���̲���
�΄�1 �l��ָ����÷�
�΄�2 ѭ�hָ��1���÷�
�΄�3 ѭ�hָ��2���÷�
�Ŀ11�����\����
�΄�1 �C���˿�Q����
�΄�2 ���P���߲���
�΄�3 ���\�����c�{ԇ
�Ŀ12���a�����
�΄�1 �a������f����B
�΄�2 �a�⾎���c�{ԇ
�Ŀ13����ĥ����
�΄�1 ��ĥ�ӹ�����
�΄�2 ��ĥ�����c�{ԇ
�Ŀ14�����ֲ���
�΄�1 ʾ�̌��־����c�{ԇ
�Ŀ15����ˮ�����ώ�ȡ�Ų���
�΄�1 ���̷���
�΄�2 ����