柔性制造教學實訓系統
欄目分類:產品總目錄 發布日期:2018-05-13 瀏覽次數:次
柔性制造教學實訓系統,直線型工業4.0教學實訓系統課程設計及初上崗位的工程技術人員進行培訓。本次方案對柔性線進行模塊化設計,由多個獨立的工作站組成,咨詢熱線13122891392
聯系方式見右側懸浮框
中人教儀廠專業為客戶提供【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】的實訓室建設方案,對【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】施行三包售后服務,如果您對我們的【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】有不了解的地方,請咨詢我們客服或來電咨詢,我們將竭誠為您服務。
1.1、方案概述
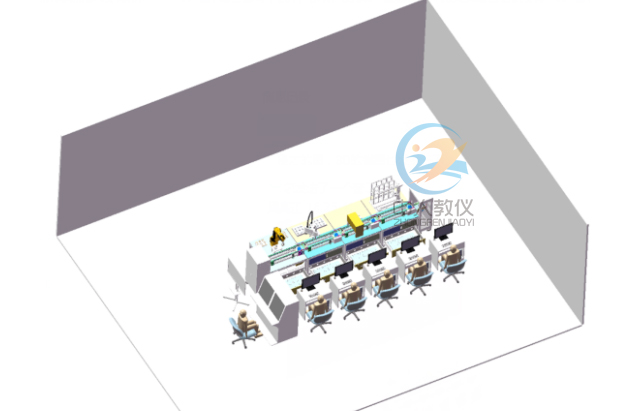
工業4.0教學實訓系統是以工業生產中的自動化裝配生產線為原型,開發的教學、實驗、實訓綜合應用平臺,使學生對工業生產的實際過程有大體的了解,掌握工業生產過程一些實際應用技術。并較好地解決了在學校期間,只接觸到以單元實驗或校外參觀實習為主,一些大型的自動化控制站只能看不能操作,達不到理想的教學效果的這個實際接觸問題。該系統是將技術、視覺檢測技術、流水線技術、液壓技術,控制技術、物聯網通訊技術和系統工程有機的融于一體,是現今工業自動化流水線柔性系統的縮影。整個軟件系統,整合了控制軟件,視覺軟件,MES軟件,仿真軟件,數字工廠仿真軟件等。軟件功能充分體現工業4.0的應用功能。它既符合工業自動化生產實際又能滿足高校自動化控制、機器人等專業創新、實驗、實訓教學需要。
系統由6個基本站組成:起始流水線換向工作站、六關節機器人上下料站、四關節機器人組裝站、視覺QC測檢站、倉儲管理工作站、終止流水線換向工作站。涵蓋了多種機器人:六關節機器人、四關節機器人,直角機器人等。工件放置在載具上,載具在流水線上循環流動。載具在每個工站上精確定位,并在載具上完成零件裝配。實現的業務功能是:按產品的工藝路線,把多個零件從料盤進料,并精密裝配成一個完整產品。并對產品視覺檢測,對不合格品移到不良區,對合格品格存放到智能倉庫里。系統采用工業級流水線設計,符合實際工業生產的節拍與精度要求。可根據用戶需求對各種工作站修改定制。采用模塊化結構設計,每個單元完成特定的工作,并可獨立運行。各工作站組合方便,不僅可以拆開進行各類單線技能訓練,還可以快速組合,進行綜合性項目訓練。最大程度的地滿足了實訓教學、工程訓練的需求。
控制系統采用MITSUBISHI公司的Fx3u系列PLC。每個工作站的控制單元由PLC、、執行機構、流水線傳送機構組成。PLC根據輸入信號和用戶程序,執行相應的計算和控制過程,并輸出各種控制信號,實現対各單元的自動控制。每個工作單元PLC都裝有組態監控軟件,監控本模塊的運行。
MES系統集成了數據采集模塊,品質模塊,定單模塊,設備維護模塊,報表模塊,看板模塊。MES系統通過RS485總線,連接每站的PLC。通過Modbus實現對每部的工作過程數據管理,MES實時采集PLC工作過程數據。把生產的進展數據,通過看板顯示在大屏幕上。并可通過APP實時查看生產進展。
系統配套的機器人仿真軟件,是一套功能強大的機器人離線編程仿真軟件。可從CAD模型獲取工件軌跡,優化后自動生成機器人代碼。并可直接倒入目標機器人中運行,也支持目標機器人語言直接編程。從模型到執行代碼一站式解決。通過集成的3D仿真功能,建立一個與實際環境相同的虛擬開發環境,并集成了豐富的工藝應用工具包。是一套解決機器人系統設計、仿真、離線編程的工具,能夠適應各種機器人。
1.2、氣電系統需求
1.2.1、氣源空壓機主要參數
1)功率≥750W;
2)壓力≥0.7MPa;
3)排氣量≥60L/Min;
4)容量≥18L;
5)外形尺寸:450×210×450mm,長、寬、高偏差在±5mm以內。
1.2.2、電源
1)輸入電源:單相三線AC220V ±10% 50Hz,裝置容量:<5kVA;
2)工作環境:環境溫度范圍為-5℃~+40℃ 相對濕度<85%(25℃)
二、總體方案介紹
2.1、標準工作臺設計模塊化柔性自動化生產線實訓系統是一種最為典型的機電一體化系統,適合相關專業學生進行工程實踐、課程設計及初上崗位的工程技術人員進行培訓。本次方案對柔性線進行模塊化設計,由多個獨立的工作站組成,其中各站的工作臺進行標準化設計。標準工作臺由標準工作臺機體、標準上層輸送線、標準下層輸送線三部分組成。
說明:
1)標準工作站的尺寸:1.2mX1.1mX1.8m;
2)上部型材框架采用40X40型材;
3)底部焊接機架采用50X50X3.2方管;
4)抽屜采用三節導軌,可全部打開,方便實訓時對控制柜的學習;
5)三聯件和開關電源安裝采用內藏式; 安全不易被碰撞;
6)上部型材門采用磁性開關檢測;正常工作開門會觸發檢測開關,設備會報警;
7)控制板采用網孔式,方便電氣元件的安裝,無需配打開孔。
8)標準工作站包括上層輸送線和下層輸送線。上下輸送線可以對換安裝;
9)采用福馬輪做地腳,一體式調節方便;
10)人機界面和開關按鈕設計在上部型材門上,方便操作。
注:視覺檢測單元會單獨再加一個視覺主機模塊在上部型材門上。
2.1.1、標準上層輸送線設計
該輸送線用于上層載具的輸送,同時可內置高精度阻擋定位機構、升降換向機構、阻擋緩存機構等,且能夠內部自由調節安裝位置。此輸送線是通過異步電機驅動同步輪,然后帶動同步帶實現移載。
說明:
1) 采用90W 異步減速調速電機驅動,同步帶傳動,速比10,速度≦30m/Min;
2) 可輸送負載5KG;
3) 定位機構可以在線體內部移動位置實現任意調節;
4) 可以移載寬204mm的載具;
5) 上線體尺寸約為:1100mmX300mmX178mm;
6) 采用耐磨帶鋼絲的聚氨酯同步帶輸送;
7)具有等待位功能,當上一工位來料太快時,可以增加一個阻擋機構實現暫時阻檔;
8)可增加定位機構,用于實現載具定位;
9)采用型材30X30,30X60型材做主體結構;
2.1.2、標準下層輸送線設計
該輸送線用于下層載具的輸送,主體型材設計,整體結構簡潔輕巧且方便加裝傳感器,兩邊有寬度調節擋板,讓載具順利輸送。此輸送線是通過異步調速電機驅動同步輪帶動同步帶傳動,使平皮帶做連續輸送。
說明:
1)采用90W 異步減速調速電機,同步帶傳動,速比10,速度≦30m/Min;
2)可輸送負載5KG;
3)可以移載寬204mm的載具;
5) 下線體尺寸約為:1100mmX350mmX178mm;
6) 采用帶導向條平皮帶帶移載;防跑偏;
7)采用30X30;30X60型材做主體結構;
8)載具兩邊設計有可調擋板;
2.1.3、高精度定位機構設計
高精度定位機構作為通用型定位組件,安裝于上層輸送線,每個單元的上層輸送線都有安裝此定位機構,通過定位機構的定位銷對載具進行精準定位。被定位的載具會在上面完成本單元的工序。此機構通過氣缸和直線軸承實現升降動作,通過氣缸和阻擋塊實現阻擋動作,通過定位銷和載具上的襯套實現定位。阻擋塊上加裝接近開關,實現到位感應。說明:
1)定位精度±0.05mm;
2)外形尺寸約為:150mmX210mmX90mm;
3)采用球型和棱形定位銷;保證精度;
4)材料采用6061鋁合金和不銹鋼材質;
5) 定位銷螺絲固定時采用雙疊型墊片或加螺絲膠,防止定位銷松動;
6) 定位機構可在上線體內部任意調節位置;
2.2、PLC
控制系統采用MITSUBISHI公司的Fx3u系列PLC。2.2.1、FX3U系列PLC介紹
1) 第三代微型可編程控制器 FX3U三菱PLC
2) 內置高達64K大容量的RAM存儲器
3)內置業界最高水平的高速處理0.065μS/基本指令
4)控制規模:16~384(包括CC-LINK I/O)點
5)內置獨立3軸100kHz定位功能(晶體管輸出型)
6)基本單元左側均可以連接功能強大簡便易用的適配器
2.2.2、Fx3u系列PLC主要特點
1)最大384點的輸入輸出點數
可編程控制器上直接接線的輸入輸出(最大256點)和網絡(CC-Link)上的遠程I/O(最大256點)的合計點數可以擴展到384點。
2)可以連接的擴展單元/模塊
輸入輸出的擴展設備可以連接FX2N 系列的輸入輸出擴展單元/模塊。此外,FX0N/FX2N/FX3U系列特殊功能單元/模塊最多可以連接8臺。
3)程序內存
內置了64K步的RAM內存。此外, 可以通過使用存儲器盒, 將程序內存變為快閃存儲器。
4)運算指令
除了浮點數、字符串處理指令以外, 還具備了定坐標指令等豐富的指令。
5)內置RUN/STOP開關
可以通過內置開關進行RUN/STOP的操作。此外, 也可以從通用的輸入端子或外圍設備上發出RUN/STOP的指令。
6)支持RUN中寫入
通過計算機用的編程軟件, 可以在可編程控制器RUN時更改程序。
7)內置時鐘功能
內置了時鐘功能, 可以執行時間的控制。
8)支持程序的遠程調試
如果使用編程軟件(GX Developer), 可以通過連接在RS-232C功能擴展板, 以及RS-232C通信特殊適配器上的調制解調器, 執行遠距離的程序傳送以及可編程控制器的運行監控
2.3、人機界面
每個PLC,都配有一臺臺灣威綸通觸摸屏,作為一機界面HMI。方便對本工作站狀態的實時查看與控制。
三、單元介紹與節拍
3.1、起始流水線換向單元3.1.1、單元機構設計
起始流水線換向單元主要包括方管焊接機架、氣動升降模組、換向組件等機構,實現載具在上下輸送線的對接。
3.1.2、單元功能介紹
本單元是起始流水線換向單元,主要功能是從下層輸送線接駁載具到上層輸送線,起始流水線換向單元執行機構主要由筆形氣缸、直線導軌、萬向關節活動機構、異步減速調速電機、同步輪、同步帶等構成,檢測裝置包括磁性開關、接近傳感器。(本單元的人機界面、電控和上料單元共用)
主要技術說明:
1)升降模組換向周期10~15s,滿足3KG負載換向;有效行程350mm;
2)外形尺寸長、寬、高為500×380×1120mm,機體采用50×50×3.2方管焊接;
3)筆形氣缸行程400mm;
4)升降具有液壓緩沖功能和機械限位功能;
5)換向組件采用異步調速電機驅動,同步輪同步帶傳動,功率25W,速比10,速度≦30M/min;
6) 采用同步帶輸送換向載具;
7)具有載具到位檢測功能;
8)輸送換向同步帶采用同步帶導向滑軌做支撐,材料白色UPE;
9)輸送換向同步帶采用耐磨帶鋼絲聚氨酯材料;
10)升降采用氣缸加直線導軌的方式;
3.1.3、實驗目的
1)了解起始流水線換向單元的動作;
2)了解升降執行機構和換向傳動機構的工作原理;
3)了解接近開關的原理和在此站的作用;
4) PLC編程;
5) 繼電器、電磁閥的使用方式;
6)直線導軌的應用;
7)認識液壓緩沖器、機械限位機構、拖鏈等;
8)了解線路、氣路布局;
3.2、上料單元
3.2.1、單元機構設計
上料單元主要包括標準工作臺、底座料盤、底座工件、6關節機器人、機械整形組件、真空吸盤機器人工裝組件等其他機構,主要實現底座工件整形,上料。
3.2.2、單元功能介紹
本單元是整個裝配柔性線的起點,主要功能是機器人從料盤取料,取出工件底座,放入到被定位的載具治具上。上料單元的執行機構主要由六關節機器人、機械整形機構、高精度阻擋定位機構、氣動夾具、同步帶流水線等構成。檢測裝置包括:負壓傳感器、接近開關、光電漫反射傳感器、磁性開關。
主要技術說明:
1)六關節機器人
以便于線體的升級和機器人的應用升級,選用了本公司生產的機器人。機器人的特點:采用自主研發的運動控制器,集成各種生產工藝包,特別是集成了視覺功能,使機器人在帶視覺的應用特別方便。 根據本項目的需求,選用了6Kg級的智能視覺機器人。
六軸機器人不僅支持在線示教與在線編程,還支持本地通過U盤Copy程序或通過MES系統下載程序。
1)料盤的智能檢測
底座法蘭料盤可一次性放9個物料,如下圖所示。工作臺裝有料盤檢測開關,如果沒有物料,則提示缺料狀態。在工作過程中,控制吸盤會判斷是否有料。判斷的原理是:通過檢測真空吸盤是否吸起工件,如果無法吸起某個料,則認為無工件,控制系統會按順序吸取下個料。
3.2.3、實驗目的
1、了解上料單元的工作過程;
2、了解料盤缺料檢測;
3、了解傳動機構和執行機構的工作原理,
4、了解光電傳感器的原理和在此站的作用;
5、了解調速器對電機進行控制的原理;
6、了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
7、了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
8、了解真空吸盤的原理;
9、了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
10、學習PLC編程;
11、了解繼電器、電磁閥等電氣元件的應用;
12、了解負壓傳感器的設置;
13、了解機械整形機構的工作原理;
14、學習6關節機器人基本編程;
15、學習6關節機器人的示教上料操作;
16、學習6關節機器人通過拖動示教上料操作;
17、PLC與機器人通訊原理;
3.3、法蘭安裝單元
3.3.1、單元機構設計
該單元主要包括標準工作臺、法蘭料盤、法蘭工件、SCARA機器人、機械整形組件等其他機構,主要實現機器人上下料和機械整形。
3.3.2、單元功能介紹
本單元是SCARA機器人取法蘭安裝到底座,主要功能是SCARA機器人從料盤取料,取出法蘭工件,放入到被定位的帶有底座料的載具上。法蘭安裝單元的執行機構主要由SCARA機器人、機械整形機構、高精度定位機構、真空吸盤、同步帶流水線等構成。檢測裝置包括:負壓傳感器、接近開關、光電漫反射傳感器、磁性開關。
主要技術說明
1)SCARA工業機器人
以便于線體的升級和機器人的應用升級,選用了本公司生產的機器人。機器人的特點:采用自主研發的運動控制器,集成各種生產工藝包,特別是集成了視覺功能,使用機器人在帶視覺的應用特別方便。 根據本項目的需求,選用了6Kg級的SCARA機器人。
3.3.3、實驗目的
1)了解上料單元的工作過程;
2)了解料盤缺料檢測;
3)了解傳動機構和執行機構的工作原理,
4)了解光電傳感器的原理和在此站的作用;
5)了解調速器對電機進行控制的原理;
6)了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
7)了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
8)了解真空吸盤的原理;
9)了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
10)學習PLC編程;
11)了解繼電器、電磁閥等電氣元件的應用;
12)了解負壓傳感器的設置;
13)了解機械整形機構的工作原理;
14)學習SCARA機器人基本編程;
15)學習SCARA機器人的示教上料操作;
16)了解SCARA機器人工作原理;
17)PLC與機器人通訊原理;
3.4、視覺檢測單元
3.4.1、單元機構設計
視覺檢測單元主要包括標準機臺、視覺檢測、紅外掃描槍組件等機構。主要實現對組裝好的工件進行檢測和數據讀取。
3.4.2、單元功能介紹
當載具到達本工位時,開啟檢測功能。包括檢測法蘭的尺寸是否合格,是否少螺絲(標準為4顆),以及法蘭是否是金屬材料。該單元的部件主要由金屬傳感器、工業相機、環形光源、紅外掃描槍、高精度定位機構、上下層流水線等構成。檢測裝置包括:工業相機、接近開關、光電漫反射傳感器、磁性開關。
主要技術說明:
1)法蘭視覺檢測
視覺系統由視覺主機,工業相機,鏡頭,光源組成。視覺主機通過千兆網口接入多個網絡接口的工業相機。視覺主機通過Modbusu接入PLC設備,當被檢測物件到達時,PLC觸發視覺系統采樣圖像,并進行圖像處理、信號識別等先進技術。并對法蘭尺寸參數進行測量,并依據判別結果返回到上位機。視覺系統的尺寸測量,配合合適的鏡頭,能達到 um 級的測量精度。
本案的配置如下:
視覺主機:10寸屏一體機
工業相機:大華A5501MG20,用500W像素,分辨率2590*2048;
相機鏡頭:16mm焦距鏡頭。如:廈門力鼎光電MV23FM16C;
工作距離:200mm;
視野:70mm*55mm;
分辨率:0.027mm/pix;
注:0.027mm/pix,相當于27um/pix。如果更換更小距離的相機鏡頭,則其精度可進一步提高。
對于檢測的閥值,可以通過HMI設置,并把檢測的值與結果,在HMI上顯示。
視覺相機具體的操作見使用說明書。
2)法蘭缺螺絲檢測
利用視覺系統,在完成法蘭尺寸檢測后,進一步檢測4個螺絲是否安裝到位。在視覺成象中,有螺絲與缺螺絲的圖象差別明顯,可方便檢測錯是否漏打螺絲。
檢測原理:測量兩條線段距離,檢測工件是否合格;
檢測原理:安裝后的工件不具有黑色孔,通過模版匹配工件后,依次檢測4個安裝位置的灰度值來判斷是否漏安裝,當檢測到漏安裝后,返回檢測結果。如圖當檢測到第二個區域漏安裝后不再檢測后面兩個區域,直接返回檢測結果。
2)金屬檢測
本工位帶的電容式傳感器,用于檢測法蘭蓋是否為金屬。通過HMI,可以檢測金屬是良品,還是非金屬是良品,或者二者都為良品。
3)紅外掃描槍
紅外掃描槍通過Modbus接入PLC系統。紅外掃描的掃入的ID,作為設備的ID,PLC關聯產品ID與檢測結果。并把結果上傳到MES系統。
3.4.3、實驗目的
1)了解視覺檢測單元的工作過程 ;
2)了解傳動機構和執行機構的工作原理,光電傳感器功能和在此站的作用以及繼電器的使用方法;
3)了解調速器對電機進行控制的原理 ;
5)學習用PLC控制編程;
6)了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
7)了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
8)了解工業視覺的工作原理及應用,學習視覺主機的操作;
9)了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
10)了解光電傳感器的工作原理及運用;
11)學習掃描槍的功能,了解與上位機通訊功能,把掃描的ID,與檢測的結果上傳到上位機;
12)了解金屬檢測原理;
13)學習PLC的檢測結果與MES系統通訊;
3.5、電梯式立體倉庫單元
3.5.1、單元機構設計
電梯式立體倉庫單元由標準工作臺、電梯式立體倉庫構成,主要實現工件自動入庫及在線顯示倉庫信息。
3.5.2、單元功能介紹
升降梯立體倉庫單元執行機構由氣缸、步進電機等構成。檢測裝置包括:紅外掃描槍、接近開關、光電漫反射傳感器、磁性開關,該站的主要功能是:根據檢測單元的法蘭是不為金屬的檢測結果,對工件進行分類,將金屬法蘭和尼龍法蘭分別放入不同的倉庫。該單元的部件主要由高精度定位機構、上下層流水線等構成。
主要技術說明
1)立體倉庫設計
支持4×4的16格庫位;總寬900~1000mm、負載12Kg。每個庫位都有傳感器,能檢測是否有料,可在線知道庫位狀態,是否空閑。工作原理:X軸是線軌模組,Y軸是氣動無桿缸,Z軸是鏈條式升降模組,工件夾取采用氣動手指,旋轉采用擺動氣缸。通過XZ的聯動,氣動手指到達對應的庫位,通過Y軸的移動和擺動氣缸以及氣動手指實現工件的進出倉。
3.5.2、單元功能介紹
升降梯立體倉庫單元執行機構由氣缸、步進電機等構成。檢測裝置包括:紅外掃描槍、接近開關、光電漫反射傳感器、磁性開關,該站的主要功能是:根據檢測單元的法蘭是不為金屬的檢測結果,對工件進行分類,將金屬法蘭和尼龍法蘭分別放入不同的倉庫。該單元的部件主要由高精度定位機構、上下層流水線等構成。
主要技術說明
1)立體倉庫設計
支持4×4的16格庫位;總寬900~1000mm、負載12Kg。每個庫位都有傳感器,能檢測是否有料,可在線知道庫位狀態,是否空閑。工作原理:X軸是線軌模組,Y軸是氣動無桿缸,Z軸是鏈條式升降模組,工件夾取采用氣動手指,旋轉采用擺動氣缸。通過XZ的聯動,氣動手指到達對應的庫位,通過Y軸的移動和擺動氣缸以及氣動手指實現工件的進出倉。
3.5.2、單元功能介紹
升降梯立體倉庫單元執行機構由氣缸、步進電機等構成。檢測裝置包括:紅外掃描槍、接近開關、光電漫反射傳感器、磁性開關,該站的主要功能是:根據檢測單元的法蘭是不為金屬的檢測結果,對工件進行分類,將金屬法蘭和尼龍法蘭分別放入不同的倉庫。該單元的部件主要由高精度定位機構、上下層流水線等構成。
主要技術說明
1)立體倉庫設計
支持4×4的16格庫位;總寬900~1000mm、負載12Kg。每個庫位都有傳感器,能檢測是否有料,可在線知道庫位狀態,是否空閑。工作原理:X軸是線軌模組,Y軸是氣動無桿缸,Z軸是鏈條式升降模組,工件夾取采用氣動手指,旋轉采用擺動氣缸。通過XZ的聯動,氣動手指到達對應的庫位,通過Y軸的移動和擺動氣缸以及氣動手指實現工件的進出倉。
3.6.2、單元功能介紹:
本單元是終止流水線換向單元,主要功能是從上層輸送線接駁載具到下層輸送線,終止流水線換向單元執行機構主要由筆形氣缸、直線導軌、萬向關節活動機構、異步減速調速電機、同步輪、同步帶等構成,檢測裝置包括磁性開關、接近傳感器。(本單元人機界面和電梯式立體倉庫單元共用)
主要技術說明:
1)升降模組換向周期10~15s,滿足3KG負載換向;有效行程350mm;
2)外形尺寸長、寬、高為500×380×1120mm,機體采用50×50×3.2方管焊接;
3)筆形氣缸行程400mm;
4)升降具有液壓緩沖功能和機械限位功能;
5)換向組件采用異步調速電機驅動,同步輪同步帶傳動,功率25W,速比10,速度≦30M/min;
6) 采用同步帶輸送換向載具;
7)具有載具到位檢測功能;
8)輸送換向同步帶采用同步帶導向滑軌做支撐,材料白色UPE;
9)輸送換向同步帶采用耐磨帶鋼絲聚氨酯材料;
10)升降采用氣缸加直線導軌的方式;
3.6.3、實驗目的
1)了解起始流水線換向單元的動作;
2)了解升降執行機構和換向傳動機構的工作原理;
3)了解接近開關的原理和在此站的作用;
4) 學習PLC編程;
5) 學習繼電器、電磁閥的使用方式;
6)學習直線導軌的應用;
7)認識液壓緩沖器、機械限位機構、拖鏈等;
8)了解線路、氣路布局;
熱門實訓室:自動扶梯模型
如對本產品/文章:柔性制造教學實訓系統,直線型工業4.0教學實訓系統有任何疑問請隨時聯系我們,我們將盡力為您提供最全的實訓室建設方案和最優質的服務
本文分享鏈接:http://www.cn1656.com/cpzh/3718.html
常見問題:
問題①:你們公司都有什么資質?
答:我們中人公司是國家注冊的生產商,具有專利證書、軟件著作權等生產型企業應當具備的資質,并且我們生產的【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】都是100%測試才允許出廠的。
問題②:如果我們單位購買【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】是否包含安裝調試培訓服務?
答:我們所有設備如果沒有注明“不含安裝/調試/培訓”等字樣(舉例:【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】不含安裝調試培訓,含運費。),都是可以包安裝調試培訓的。
問題③:你們能提供【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】的整體實訓室的建設方案嗎?
答:如果您對我們的【柔性制造教學實訓系統,直線型工業4.0教學實訓系統】有意向,可以來電咨詢或者咨詢企業QQ:2198972893。讓我們客服為您量身定做一個方案或者提供我們現有的方案。同時需要您留下貴單位的全稱,方便我們做報告。
上一篇:工程型環形柔性制造生產線實訓裝置
這些是最新的

熱門排行
